EVU XXII 2013-18 Il progetto TACOT: verso un sistema GNSS affidabile
Steeve FAVRE – FDC
Ralf-Roland Schmidt-Cotta Continental
Abstract
 Da molti anni la necessità di una fornitura di informazioni GNSS sicura ed affidabile sta crescendo sempre di più e ben oltre le usuali applicazioni di sicurezza (Safety of life domains). Le pochissime soluzioni tecniche che esistono oggi sono troppo complesse e troppo costose per la maggior parte delle applicazioni.
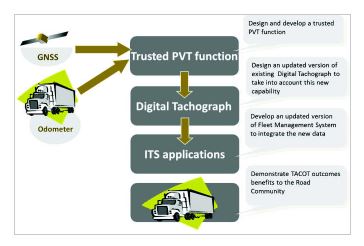
Da molti anni la necessità di una fornitura di informazioni GNSS sicura ed affidabile sta crescendo sempre di più e ben oltre le usuali applicazioni di sicurezza (Safety of life domains). Le pochissime soluzioni tecniche che esistono oggi sono troppo complesse e troppo costose per la maggior parte delle applicazioni.TACOT offre allora una nuova alternativa tecnica che, con un alto grado di affidabilità e robustezza e a costi ridotti, indica poszione, velocità e tempo (ingl. PVT). La soluzione proposta (funzione PVT affidabile) si basa essenzialmente sulla riunione e sulla composizione delle diverse fonti di informazione per garantire un elevato livello di attendibilità. Il nuovo concetto è basato soprattutto sulla tecnica bayesiana ed è particolarmente difficile da trattare.
Questa soluzione trae vantaggio anche dalla molteplicità di costellazioni GNSS ed EGNOS per migliorare la qualità dei
risultati. In tal modo TACOT prepara anche il mercato per l’introduzione di Galileo.
L‘approccio di TACOT è quello di indicare le caratteristiche essenziali di questa innovazione tramite un miglioramento del tachigrafo digitale (qui chiamato: Augmented Digital Tachograph o ADT), proprio in previsione della modifica del
regolamento della UE 3821/85. Il miglioramento previsto consiste nel fornire da un lato una seconda informazione di movimento e dall’altro lato la posizione GNSS per l’inizio e la fine dei viaggi in modo affidabile e sicuro per l’ADT.
TACOT è ampiamente in grado di sostenere l’uso di dati PGZ attendibili tramite una qualunque applicazione ITS per conto di terze parti. A TACOT appartengono dunque la definizione e l’integrazione di una interfaccia esterna per la
programmazione di applicazioni (Application Programming Interface, API) in ADT per mettere a disposizione anche questi dati sul CAN-bus.
A completa dimostrazione degli sviluppi di TACOT, i dati relativi ai prototipi sviluppati nel progetto vengono trasmessi ad un sistema di gestione di flotta commerciale (Flotten-Management System, FMS). Tale dimostrazione metterà in evidenza soprattutto i progressi dei sistemi GNSS (precisione, disponibilità…), il guadagno in termini di affidabilità rispetto alle potenziali minacce e ai punti deboli di GNSS e i dati utilizzati da ADT e FMS.
La lettura di questo articolo è riservata ai solo Soci EVU Italia
| Autore | Steeve FAVRE - FDC Ralf-Roland Schmidt-Cotta Continental |
| Pubblicato il | |
| Tipologia |